【电机控制】锁相环PLL设计
@TOC
前言
提示:本文着重参考了参考文献中的内容
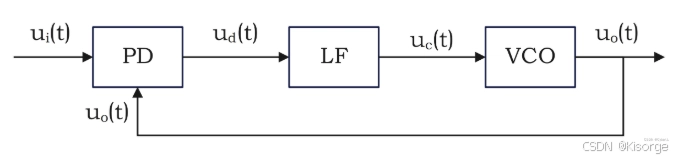
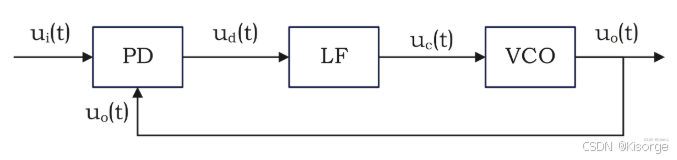
一、控制框图
PLL各个部分的作用如下:
鉴相器(PD):起到相位比较器作用,它对输入信号相位ui(t)与输出信号相位uo(t)的相位进行比较, 产生误差 ud(t)。
环路滤波器(LF):环路滤波器作用是滤除误差的高频成分和噪声,并改善锁相环路的噪声性能,输出uo(t)信号的频率uc(t)。
压控振荡器(VCO):根据来自滤波器的输出信号频率uc(t)调整其输出信号uo(t)。
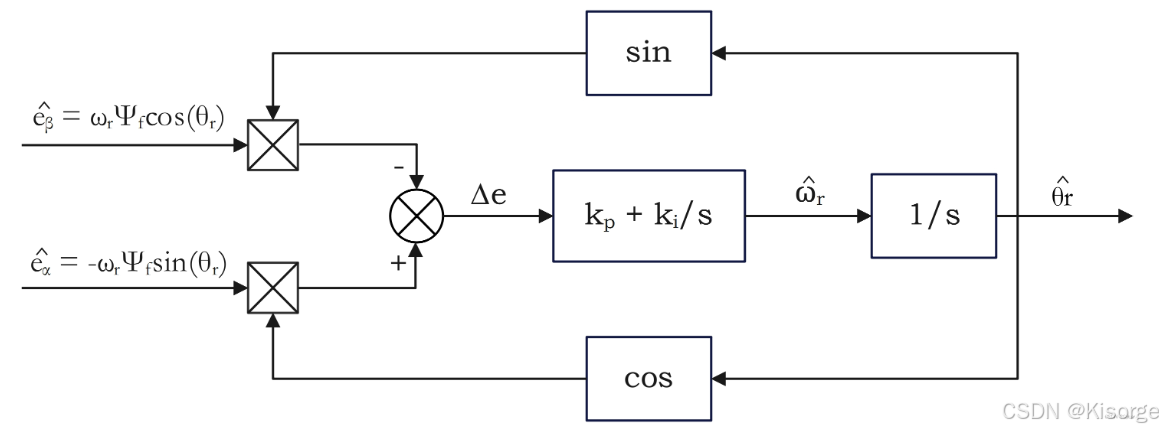

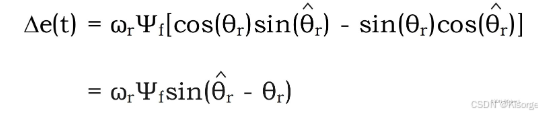
二、理论公式
1. PD累计误差
2. LF环路滤波Kp,Ki调参
3.VCO 累计误差

三、代码
将理论公式离散化处理
1. PLL计算
pv->Theta_Err = -(alpha*arm_cos_f32(pv->Theta)) + (-beta)*arm_sin_f32(pv->Theta); //通过矢量叉乘或者角度误差
pv->Omega += pv->Kp*(pv->Theta_Err - pv->Theta_Err_last) + TS*pv->Ki*pv->Theta_Err; //经过PI调节器获得转速,转速为弧度制电角速度2. 参数初始化
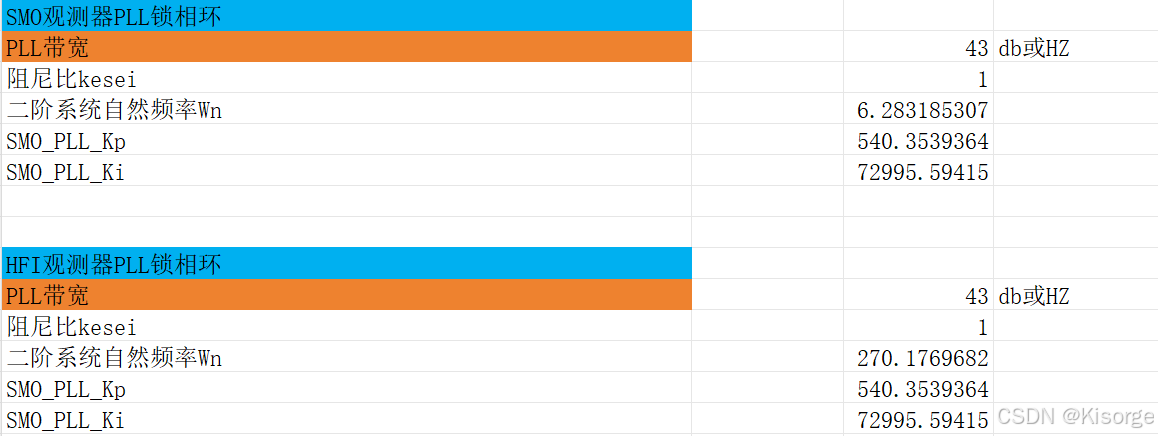
PLL_SMO_Para.Kp = 540.35f; //阻尼比为1,带宽为43Hz Kp=2ζω0 ω0=2pi
PLL_SMO_Para.Ki = 72995.6f; //Ki=(ω0)^2PLL_HFI_Para.Kp = 540.35f; //阻尼比为1,带宽为43Hz Kp=2ζω0/k2 ω0=2pi
PLL_HFI_Para.Ki = 72995.6f; //Ki=(ω0)^2/k2四、参考文献
【电机控制】PMSM无感FOC控制(八)锁相环(PLL)的应用
永磁同步电机无速度算法--滑模观测器(PLL)
锁相环(PLL)基本原理
PLL锁相环带宽定义,以及PI参数自动整定
使用频率响应法计算锁相环带宽
【PLL】为什么 环路带宽是参考频率的1/10
总结
本文仅仅简单介绍了【电机控制】锁相环PLL设计,评论区欢迎讨论。